Project Overview
Graduate Research Project to design an unmanned system to profile water characteristics of precise locations within the Berkeley Pit, a former open pit mine, and collect water samples at depths of 700 feet.






My Role
- Designed and implemented automated water sampling and data collection systems
- Designed PCBs and embedded controller firmware for mixed-signal feedback and control
- Created custom HMI web server on a Raspberry Pi
- Integrated hardware systems with web server for remote control of major systems and real-time data logging
Project Background
Berkeley Pit History
- 1955 – 1982
- Open-pit mining started in Butte, MT
- 320 million tons of ore mined
- 1982
- Decline in copper prices leads to the shutdown mining in the Berkeley Pit
- Water pumps shut off
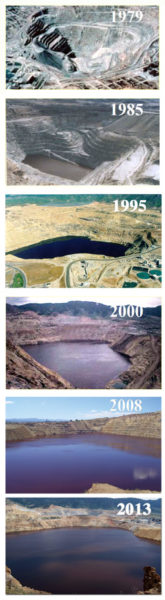
- 1982 – present
- Surface runoff and groundwater have filled the open-pit mine with acidic water containing dissolved heavy metals
Current Status of the Pit
- 46 billion gallons of water
- Filling at about 2 million gallons per day
- pH near 4
- Maximum depth near 850 feet
- Part of the largest EPA Superfund site
- Requires semi-annual sampling and profiling of the water
Manual Sampling
- Required multi-person team to operate a boat on the pit
- Very Dangerous
- Hazardous water (pH and temperature)
- Potential slope failures
- Time consuming (2 day operation)
Project Challenges
Mechanical
- Harsh working environment
- Profiling and sampling water at depths down to 600 feet
- Remote control of water vessel to precise coordinates
- Redundancy to prevent catastrophic failure while on the pit
Electrical
- Design and coordination of feedback controllers for multiple sub-systems
- Real-time remote control, system monitoring, and data collection
- Wireless communication over water
Publications
Bryce Hill, P. Cote, W. Leishman, A. Alangari, M. Erickson, T. Holliday, C. Ellertson, and T. Fricks (Electrical Engineering, Montana Tech), T.E. Duaime and G.A. Icopini (Montana Bureau of Mines and Geology). “Remote Sampling of Berkeley Pit via Semi-Autonomous Boat”. 2018 Marris Water Conference, Tucson, AZ. Apr. 2018
Duaime, TA; Icopini, GA; Hill, BE; Cote, P; Leishman, W; Alangari, A; Erickson, M; Holliday, T; Ellertson, C; Fricks, T. “Unmanned Partially Autonomous Boat for Profiling and Sampling the Berkeley Pit”. 11th Int. Conf. Remediation of Chlorinated and Recalcitrant Compounds, Battelle, Palm Springs, CA. Apr. 2018
Castendyk, Devin; Hill, Bryce; Filiatreault, Pierre; Straight, Brian; Alangari, Abdullah; Cote, Patrick; Leishman, William. “Experiences with Autonomous Sampling of Pit Lakes in North America using Drone Aircraft and Drone Boats”. International Mine Water Association Conference and International Conference on Acid Rock Drainage. Pretoria, Gauteng, South Africa. Sept. 2018
In The News
Testing the waters: Boat destined for Berkeley Pit makes maiden voyage
Maiden voyage: Berkeley Pit boat launches successfully